自動運転車両で100メートル先の歩行者を検知する「量子レーダー」とは:5分で分かる最新キーワード解説(2/3 ページ)
複雑な量子をレーダーに応用し、悪条件でも人やモノを捉える「量子レーダー」が誕生した。電波を使うレーダーと何が違うのか。
「量子レーダー」の仕組みは?
では、量子レーダーはどのように対象を検知するのだろうか。図1は、従来のステレオカメラによる対象検知と、量子レーダーによる検知とを比較したものだ。
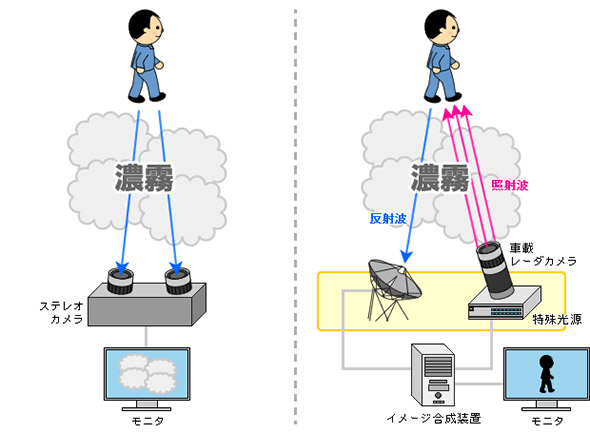
カメラを利用する方法では、左側のように可視光(または赤外線)を反射する歩行者からの光をカメラが検知することになるが、霧や雨などの環境擾乱(じょうらん)要素が間に入ると、カメラ側でどれほど精巧な映像加工技術を駆使しても正確にイメージングできなくなってしまう。
一方、量子レーダーでは、車に搭載した特殊光源(レーザーと専用装置を利用したスクィーズド光からの光を対象に向けて照射する。間に擾乱要素があったとしても、かすかな光(光子が数百個程度の、暗闇で人間の目に感ずるか感じないか程度の光)が反射して戻ってくれば、それを専用装置で受信、計算処理をして、距離、移動方向、移動速度、形状を検知し、さらに映像として映し出すことまで理論的には可能だ。これをもう少し分かりやすくしたのが図2だ。
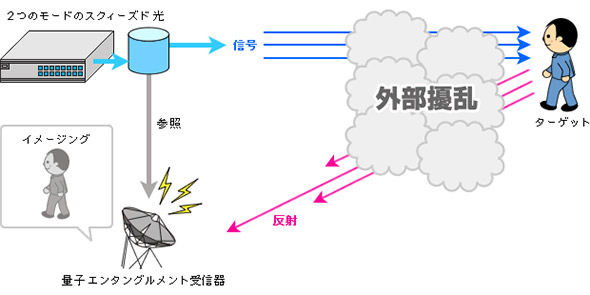
この図だけでは「カメラの機能をレーダーに加えたということ?」と誤解されるかもしれない。光の反射を利用するという意味ではそうともいえるが、対象検知のための基礎原理がカメラとも既存レーダーとも全く異なる。
検知のために使われるのが「量子エンタングルメント」現象である。ポイントは、図2の光源部分で、2つのモードのスクィーズド光を生成して送り出していることだ。
光源装置内部にあるレーザーが放出した光を、いったん2倍の周波数に変換した後、「光パラメトリック発振機」と呼ばれる装置で半分の周波数の2つのスクィーズド光に加工し、分割する。すると、1個の光子を2個に分裂させた状態と同じように、両方のスクィーズド光には「量子モード・エンタングルメント」と呼ばれる相関関係が生まれる。これは、粒子レベルのミクロなエンタングルメントと同じような量子効果を、何万という光子が作る光ビームで実現したものと考えれば良い。
一方のスクィーズド光は、量子ビームとして対象に向けて照射され、もう一方は専用の受信器に「参照光」として送られる。対象に反射して戻る信号光は、対象に反射した時に相互作用を受けて変調する。これを受信装置内の光ダイオードで受光してパワーを測定する。一方の参照光はCCDカメラで受光する。両方の受光デバイスからの信号を計算処理すると、検知対象の有無、距離、移動方向、速度、さらに形状が分かるというのが量子レーダーの原理だ。
反射して帰ってくる光は、数百個の光子だけで良く、一般的なカメラ技術ではとてもイメージ再現ができない、かすかな光でも検知が可能だ。既存のレーダー技術では対応できない激しい雨、濃霧、雷などのような気象条件や周辺環境下であっても十分に利用可能になる。
受信側での計算の方法が気になるところだが、それには先行研究と異なる方法が用いられる。説明するにはA4サイズで5ページ分の量の数式が必要になるので全てを紹介できないが、計算処理に専用のCPUを利用すれば1Gbpsの性能で処理可能という。光源は1マイクロワットで機能し、実用的には1ミリワット程度が必要になる。
Copyright © ITmedia, Inc. All Rights Reserved.