自動運転の影の主役「ダイナミックマップ」とは?:5分で分かる最新キーワード解説(3/5 ページ)
カーナビの道案内機能を超えた高精度3D地図情報が自動車運転を可能にする「ダイナミックマップ」。信号の状態も分かるかもしれない。
データはクラウド上の情報センターに集約、適切に配信
静的情報以外の情報で自動車走行に関連深いものをもう少し具体的に言えば、自動車専用道路なら「閉鎖している料金レーン」「料金所前後の車の合流・分流状況」「渋滞情報」「先行車の情報」「周辺車両の情報」「隣接車の情報」「工事規制情報」「駐車場の空き情報」「駐車場内の走行車両情報」などだ。一般道では「優先道路を走行する車両情報」「歩道の歩行者情報」「信号の状態」「対向車情報」「2輪車情報」「車道の自転車・歩行者情報」「気象情報」など各種のものがある。
これらのうち一部は車両搭載のレーダーやカメラなどで検知することができるため、車両搭載の設備のみでも対応可能かもしれないが、全てはとても無理だ。既存の道路交通システムや公的機関からの情報、さらに多数の自動車の走行情報や車両情報を取得し、ドライバーあるいは車両に合わせて利用しやすい情報に加工した上、走行中の車両にも即座に無線で送ることができなければならない。
これにはクラウドの利用が必須であり、無線で道路や車両の情報を情報センターに集めて処理した上で、やはり無線で車両に提供することになる。どのように情報を加工するかについてはAI技術の応用が視野に入っている。既存の道路交通情報は当然利用されることになるが、その他の動的情報をどのように集めるか、それをどのように利用するかは検討の途上にある。
何を目指したものなのか?
SIPが掲げている目前の目標は、2020年までに自動運転のレベル3以上に到達することである。これにダイナミックマップが大きな役割を果たすことになるだろう。自動運転のレベルは、米国SAEインターナショナルの「SAE J3016」にて次のように定義されている。
レベル0
現在の一般的なドライバー自身が運転する、自動運転機能のない自動車の段階。
レベル1
自動車の機能として運転支援機能を備える段階。ACC(Adaptive Cruise Control:定速走行、車間距離制御装置)、車線維持システム(LKAS:Lane Keep Assist System)、自動ブレーキなどの機能を持つ。現在はさまざまな自動車で普及している。
レベル2
レベル1のシステムを組み合わせた上、例えば高速道路での合流、車線変更、車線や車間維持、分流などを自動化(「官民ITS構想 ロードマップ2017」による)したシステム。「準自動パイロット」段階で、ハンドル操作や加速、減速を自動車が支援してくれるもので、一部は実用化している。
レベル3
限定的な条件での自動運転。例えば高速道路などだけで自動運転できるが、緊急時などにはドライバーが自分で対応する必要がある。
レベル4
限定的な条件でシステムが全ての運転タスクを実施する段階。該当条件下ならドライバーが要らなくなる。
レベル5
どのような条件であっても完全に自動運転可能なレベル。こちらは現在では夢の世界だ。
現在の自動運転支援機能では、ほとんどの運転操作はドライバー自身が行っており、ドライバーの乗車は必須だ。しかし自動ブレーキや車速の調整、レーン維持など一部の車両制御は、車両自身が備えるセンサーからの情報をもとに車両搭載のコンピュータが処理して実行している。車両から収集できる情報には、例えば次の表のようなものがある(想定含む)。これらの情報を駆使すれば、個別車両の状態はほぼ把握できるだろう。
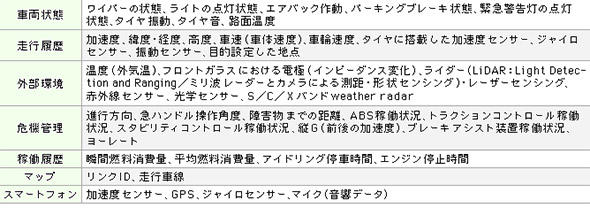
これらデータには、走行状況を示す准静的、准動的情報が含まれている。それら情報は同じ道を走る他の車両にとっても、危険回避、安全走行のために有用な情報になり得る。ダイナミックマップでは、こうしたプローブ情報も取り込み、車両の自動制御に役立てようとしている。このようなデータは自動車メーカーの独自性につながっているため、データ取得に課題はあるが、レベル3の自動運転を実現するには不可欠だ。
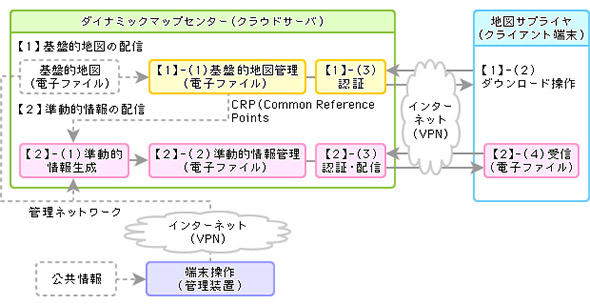
このように、ダイナミックマップは高精度な3次元地図データ、車両のプローブデータ、外部からの各種データを全部まとめた、従来のマップのイメージとはまるで違うデータ群なのである。その生成、更新、配信は、現在プロトタイプとして図3のように考えられている。
Copyright © ITmedia, Inc. All Rights Reserved.